Section: New Results
Bayesian Modelling of Sensorimotor Systems and Behaviors
Results described in this section were done in collaboration with the LPPA collège de France.
Bayesian based decision making in multi-player video games
Participants : Gabriel Synnaeve, Pierre Bessière.
The problem addressed in this work is the autonomous replacement of a human player. It is the continuation of last year's work on the same topic as well as a follow-up of previous E-Motion Ph.D Ronan Le Hy [64] . This year, we focused on real-time strategy (RTS) games, in which the players have to build an economy, advance technology, produce and control an army to kill the opponents. From a research point of view, multi-player games are interesting because they stand for a good in-between of the real world and simulations. The world is finite and simulated (no sensors problems) but we didn't wrote the simulation and the other players are humans (or advanced robots in the case of AI competitions).
This year's research work focused on tactical prediction and decision-making as well as armies composition adaptation. For the tactical model, the idea is to have (most probably biased) lower-level heuristics from units observations, which produce information exploitable at the tactical level, and take advantage of strategic inference too. We abstract space into automatically extracted choke points and regions of StarCraft maps from a pruned Voronoi diagram (using [71] ). We then assign different scores to each of these regions and learn the influence of these scores on different attack types and locations. To do that, we set up a huge data-set of professional player's games, whose game state was extracted [29] . This work was accepted for publication at Computational Intelligence in Games (IEEE CIG) 2012 in Grenada [30] and was presented at the Computer Games Workshop of the European Conference of Artificial Intelligence (ECAI) 2012 [28] .
Another focus of work this year was on army composition adaptation. RTS games unit types combinations in armies can be seen as complex (soft max) rock-paper-scissors games. Our analysis boiled to down army compositions encoded as clusters (we used a Gaussian Mixtures Model) of “classic” combinations (because of economy and technology constraints during the game). This work was published at the AI in Adversarial Real-Time Games workshop of AAAI AIIDE 2012 [29] .
On top of the research/evaluation implementation, we also implemented it in our StarCraft: Broodwar's bot implementation BroodwarBotQ. With this bot, we took part in AIIDE and CIG conferences AI tournaments placing respectively 4th (out of 10) and 6th (out of 10). Gabriel Synnaeve defended his thesis on October 24th 2012.
|

Bayesian modelling to implement and compare different theories of speech communication
Participants : Raphael Laurent, Pierre Bessière, Julien Diard, Jean-Luc Schwartz.
A central issue in speech science concerns the nature of representations and processes involved in communication. The search for phoneme or syllable specific invariants led to three major sets of approaches: motor, auditory and perceptuo-motor theories. They have been widely argued for and against, but the theoretical debate appears to be stagnating. It is our belief that computationnal models designed within a rigorous mathematical framework may allow to put forward new arguments to support either theory, and new ideas for experiments to be carried out on human subjects.
We have designed an integrative Bayesian model which allows to study auditory, motor and perceptuo-motor aspects of speech production and perception. In 2011, this model was used to work on purely theoretical simulations where we studied with diverse paradigms the decrease in the performances predicted by the different theories due to communication noise. This work led to the proof of an indistinguishability theorem : given some hypotheses on the learning process, purely motor and purely auditory models have identical answers to perception tasks. Thanks to VLAM, a vocal tract simulation tool which allows to map articulatory parameters to acoustic signals, we tested our model on vowel perception tasks. The results of both these studies are detailed in [70] .
In 2012, we worked on a much more complex version of the model, which mas made able to deal with plosive syllable production and perception. A first version of this model was tested on perception tasks on evaluation corpora with more and more variability compared to the learning corpus. This showed a really high robustness of the purely motor model, which contained more information that it is the case in practise, due to unrealistic learning methods. That's why the work was then focused on more realistic learning algorithms, where speech motor gestures are unsupervisedly learned through imitation, by generating motor gestures trying to reach auditory targets, and memorising the acoustics corresponding to these motor commands.
Bayesian programming : book and software
Participants : Emmanuel Mazer, Pierre Bessière.
A need for a new computing paradigm
Bayesian probability theory is a mathematical alternative to logic.
However, we want working solutions to incomplete and uncertain problems. Consequently, we require an alternative computing framework based on Bayesian probabilities.
To create such a complete computing Bayesian framework, we require a new modeling methodology to build probabilistic models, we require new inference algorithms to automate probabilistic calculus, we require new programming languages to implement these models on computers, and finally, we will eventually require new hardware to run these Bayesian programs efficiently.
Our ultimate goal is a Bayesian Computer. The purpose of this book is to describe a formalism and a computer langage as first steps in this direction.
Outline of the book
Its purpose is to introduce the fundamental concepts of Bayesian Programming, to present the novelty and interest of the approach, and to initiate the reader to the Bayesian modeling. Numerous simple examples of applications are presented in different fields.
It is divided in three parts, chapters 2 Basic-Concepts to 6: Bayesian-Program which presents the principles of Bayesian Programming, chapters 7 : Information-Fusion to 11 : Bayesian-Programming-Iteration which offer a cook book for the good practice of probabilistic modeling and 12 : Bayesian Programming Formalism to 16 Frequently Asked Question which revisit the Bayesian inference and learning problems with the help of the presented formalism.
A fist version of the book will be send to the reviewer selected by the editor before the end of 2012
Distributed Software
One way to read this book and learn bayesian programming is to run and modify the programs given as example. A Python package “pypl” based on Probt bindings is made available with book.
The source code of the examples as well as the Python package can be downloaded free of charge.
Many examples in the book are given with parts of real corrresponding programs which could be run using the distributed package. They are given under the following format
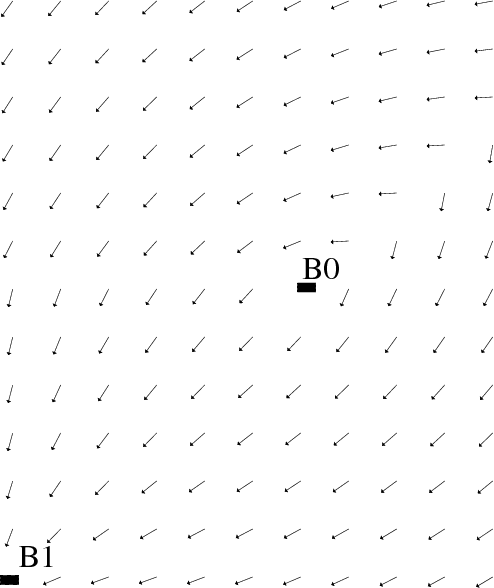
The figure 26 has been generated using the program
“chapter7/invpgm.py”. The following instruction allows to
get to most probable value for the heading
PH=PHkB0B1.instantiate(sensor_reading_values)
best=PH.compile().best()
Bayesian programs are also used to generate the illustration of the book such as this one which illustrating the navigation based on sensor fusion.